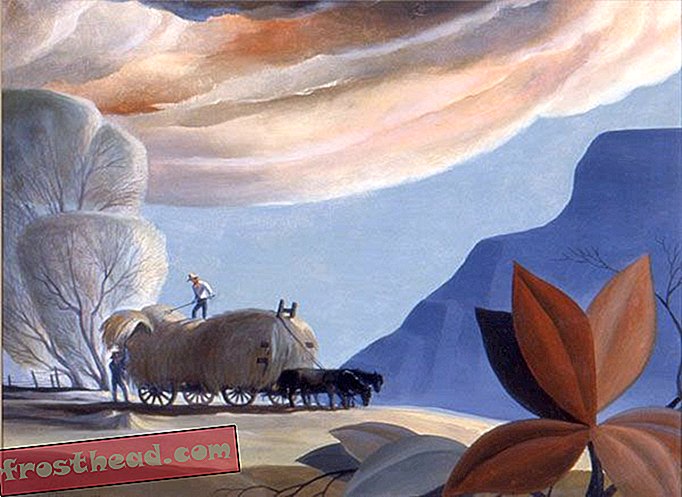
Il nuovo robot attraversa una superficie irregolare in un modo modellato da una lucertola dalla coda di zebra. Immagine gentilmente concessa da Chen Li, Tingnan Zhang, Daniel Goldman
Progettare un robot in grado di muoversi facilmente su terreni sconnessi, ad esempio un rover destinato a attraversare la superficie di Marte, pone una sfida ingegneristica unica: le ruote affondano comunemente in quello che gli ingegneri chiamano "terreno scorrevole" (miscele di sabbia, terra, fango ed erba ).
Date le molte innovazioni biologicamente ispirate alla robotica, un team di ricercatori della Georgia Tech ha avuto un'idea: basare un design su creature del deserto come lucertole dalla coda zebra che sono in grado di arrampicarsi su una superficie sciolta e sabbiosa senza rallentare. I loro sforzi hanno permesso loro di creare questo piccolo dispositivo a sei zampe, presentato in un articolo pubblicato oggi su Science, che può attraversare una superficie granulare in un modo che ricorda in modo misterioso un rettile.
Il team di ricerca, guidato da Chen Li, ha progettato il dispositivo dopo aver studiato la locomozione di varie creature e simulato matematicamente le prestazioni di diversi tipi di gambe (variabili in numero, forma e lunghezza) in diversi ambienti distinti. Sperano che la loro ricerca stimolerà lo sviluppo di un campo che hanno definito "terradinamica", proprio come l'aerodinamica riguarda le prestazioni dei veicoli alati in aria, il loro campo studierà il movimento dei veicoli con le gambe su superfici granulari.
Per progettare il proprio robot, hanno utilizzato queste simulazioni per determinare le lunghezze esatte delle gambe, le velocità di movimento e i livelli di forza che spingerebbero i dispositivi su una superficie libera senza farli affondare troppo in profondità. Hanno quindi stampato una varietà di tipi di gambe con una stampante 3D e hanno costruito robot per testarli in laboratorio.
Uno dei loro risultati più interessanti è che gli stessi tipi di principi di progettazione si applicano alla locomozione su una varietà di superfici granulari, tra cui semi di papavero, perle di vetro e sabbia naturale. Le loro simulazioni e gli esperimenti del mondo reale hanno rivelato che le gambe a forma di C generalmente funzionavano meglio, ma che qualsiasi tipo di arti a forma di arco funzionava relativamente bene perché spargevano il peso del dispositivo su lunghe superfici delle gambe (sebbene strette) man mano che le gambe arrivavano a contatto con il terreno nel corso di un passo.

I ricercatori hanno scoperto che gli arti a forma di C funzionano meglio per spostarsi rapidamente su superfici granulari, sia nelle lucertole che nei robot. Le rappresentazioni tratteggiate, solide e punteggiate in C e D sono posizioni di gamba iniziale, media e tardiva durante un passo. Le frecce indicano le direzioni di movimento per specifiche regioni delle gambe. Immagine via Science / Li et. al.
Le applicazioni di questo tipo di ricerca sono ampie: questo particolare robot, affermano i ricercatori, potrebbe essere sviluppato in un utile dispositivo di ricerca e salvataggio o di scouting, mentre i principi derivati dal campo della terradinamica potrebbero essere utili nella progettazione di sonde per esplorare altri pianeti in futuro. Potrebbero anche aiutare i biologi a capire meglio come si sono evolute le forme di vita qui sulla terra per spostarsi sulla superficie del nostro pianeta.