È abbastanza comune per gli esseri umani, in particolare quelli che lavorano nella produzione, fare un nodo, togliere l'involucro da un cavo, inserire un perno in un foro o utilizzare uno strumento manuale come un trapano. Possono sembrare compiti semplici, ma sono davvero molto complessi e comportano movimenti di dita e mani estremamente fini.
Contenuto relativo
- Come i robot hanno lasciato il laboratorio e hanno iniziato ad aiutare gli umani
Sebbene i robot siano sempre più coinvolti nel lavoro in fabbrica e in una vasta gamma di altri tipi di lavori - incluso nel settore dei servizi e dell'assistenza sanitaria - la loro destrezza non è altrettanto impressionante. Da quando le persone le hanno portate a lavorare nelle fabbriche automobilistiche più di 50 anni fa, abbiamo costruito robot in grado di saldare, verniciare e assemblare parti abbastanza bene. Le migliori mani robotiche di oggi possono raccogliere oggetti familiari e spostarli in altri luoghi, come prendere i prodotti dai contenitori del magazzino e metterli in scatole.
Ma i robot non riescono a orientare correttamente uno strumento manuale, ad esempio allineando un cacciavite a croce con le scanalature su una vite o puntando un martello a un chiodo. E sicuramente non possono usare due mani insieme in modi dettagliati, come sostituire le batterie con un telecomando.
Le mani umane sono eccellenti in questi compiti e molto altro. Per avvicinarsi persino a rivaleggiare con ciò di cui le nostre mani sono facilmente capaci, le mani dei robot hanno bisogno di maggiore agilità, affidabilità e resistenza - e devono essere in grado di percepire in modo più preciso e muoversi ancora più finemente di quanto non facciano adesso, per capire di cosa si occupano " re in possesso e come afferrarlo al meglio. Affinché i robot possano lavorare a fianco degli umani, dovremo capire come creare robot che possano letteralmente darci una mano quando i nostri due non bastano.
Il mio gruppo di ricerca alla Northeastern University sta lavorando proprio su questo, in particolare per i robot umanoidi come la Valkyrie della NASA, che ha tre dita e un pollice su ogni mano. Ogni cifra ha articolazioni simili a nocche e ogni mano ha un polso che può ruotare facilmente. Stiamo lavorando alla creazione di movimenti: combinazioni di movimenti del braccio, del polso, delle dita e del pollice che eseguono collettivamente un compito, come spostare una chiave in un cerchio per stringere un bullone o tirare un carrello da un luogo all'altro.
 Ognuno di questi robot industriali ha molteplici strumenti specializzati. Molti dei loro compiti potrebbero essere svolti da mani robotiche? (Steve Jurvetson / flickr, CC BY)
Ognuno di questi robot industriali ha molteplici strumenti specializzati. Molti dei loro compiti potrebbero essere svolti da mani robotiche? (Steve Jurvetson / flickr, CC BY) L'importanza delle mani
Invece di rendere ogni robot una macchina personalizzata su misura per un compito molto specifico, dobbiamo progettare robot multiuso, o anche macchine così capaci che potrebbero essere chiamati "scopi generali" - buoni per quasi ogni compito. Una chiave per il successo di questi tipi di robot saranno le mani eccellenti.
Il nostro lavoro si concentra sulla progettazione di una nuova classe di mani robot adattabili in grado di eseguire movimenti precisi e una presa autonoma. Quando i robot sono in grado di martellare le unghie, cambiare le batterie e fare altri movimenti simili - fondamentali per gli umani ma molto complessi per i robot - saremo sulla buona strada per la destrezza umana nelle mani dei robot.
Il raggiungimento di questo obiettivo comporta anche l'invenzione di nuovi design che incorporano elementi duri e morbidi: il modo in cui l'osso umano dà forza a una presa, con la pelle che diffonde la pressione in modo che un bicchiere di vino non si frantumi.
Sviluppo e test più rapidi
I moderni miglioramenti tecnologici stanno facilitando il processo di sviluppo. Con la stampa 3D, possiamo realizzare prototipi molto rapidamente. Possiamo persino realizzare componenti usa e getta a basso costo per provare diverse disposizioni di meccanismi, come pinze a due o tre dita per semplici operazioni di pick-and-place o mani robot antropomorfe per operazioni più delicate.
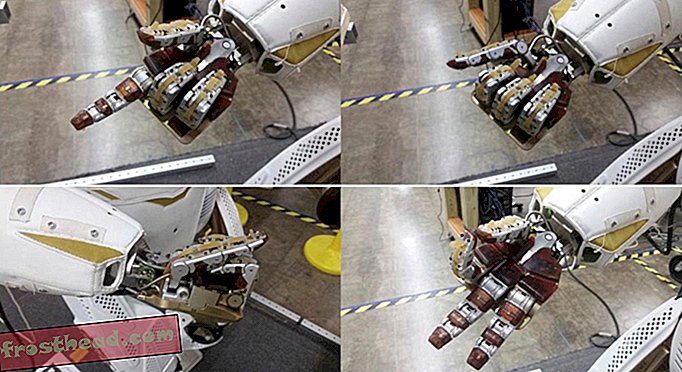 Diversi tipi di mani su un robot della NASA Valkyrie. (Northeastern University, CC BY-ND)
Diversi tipi di mani su un robot della NASA Valkyrie. (Northeastern University, CC BY-ND) Man mano che le telecamere e i sensori elettronici si riducono, siamo in grado di incorporarli in nuovi modi. Ad esempio, se mettiamo i sensori di pressione e le telecamere in una mano robotica, possono fornire feedback al controller del robot (umano o automatizzato) quando un'impugnatura è sicura o se qualcosa inizia a scivolare. Un giorno potrebbero essere in grado di percepire in quale direzione si sta muovendo l'oggetto che scivola, in modo che il robot possa catturarlo.
Queste abilità sono già una seconda natura per l'uomo attraverso la visione e la propriocezione (la capacità di percepire le posizioni relative delle parti del corpo senza guardarle o pensarci). Una volta che siamo in grado di raggiungerli con i robot, saranno in grado di fare cose come rilevare se una presa è troppo forte e stringe un oggetto troppo forte.
Pianificazione di movimenti coordinati
Un'altra pietra miliare sarà lo sviluppo di metodi per i robot per capire quali movimenti devono fare in tempo reale, compreso il rilevamento di ciò che accade nelle loro mani in ogni momento. Se una mano di robot è in grado di rilevare i cambiamenti negli oggetti che sta maneggiando o manipolare oggetti mentre li tiene in mano, potrebbe aiutare con quelle attività manuali comuni come la legatura e la spelatura.
Lavorare con due mani insieme è ancora più lontano nel futuro, anche se fornirebbe una spinta significativa, in particolare per la produzione. Un robot in grado di azionare un trapano con due mani o di trasferire parti di macchine da una mano all'altra sarebbe un grande miglioramento, consentendo alle fabbriche di automatizzare ancora più passaggi nei loro processi.
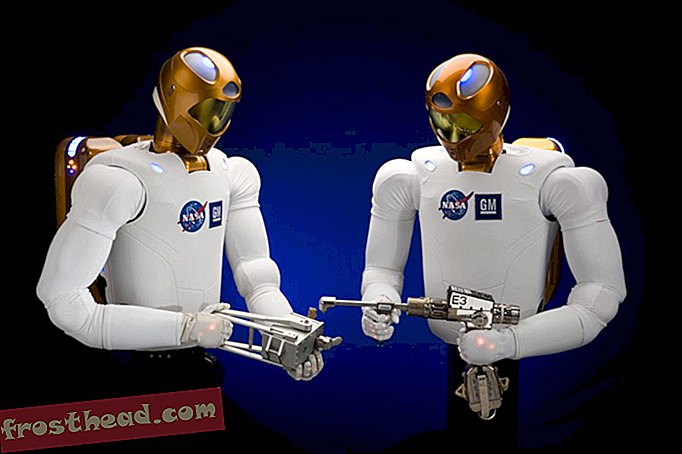 È questo il robot del futuro? (NASA)
È questo il robot del futuro? (NASA) Noi umani non abbiamo ancora sviluppato questi sistemi. Raggiungere una destrezza autonoma robotica simile all'uomo manterrà impegnati ricercatori, tecnologi e innovatori di robotica nel prossimo futuro. Non rallenterà la rivoluzione robotica in corso nella produzione, perché i processi attuali hanno ancora molto spazio per l'automazione per migliorare sicurezza, velocità e qualità. Ma mentre miglioriamo ulteriormente i robot, saranno in grado di darci una mano.
Questo articolo è stato originariamente pubblicato su The Conversation.
Taskin Padir, professore associato di ingegneria elettrica e informatica, Northeastern University