Piaccia o no, siamo circondati da robot. Migliaia di americani cavalcano al lavoro in questi giorni in auto che praticamente si guidano da sole. Gli aspirapolvere si spostano da soli nei nostri salotti. I droni Quadcopter comprimono automaticamente i campi agricoli, effettuando sondaggi aerei che aiutano gli agricoltori a coltivare i loro raccolti. Anche robot umanoidi dall'aspetto spaventoso, che possono saltare e correre come noi, potrebbero essere disponibili in commercio nel prossimo futuro.
I dispositivi robot stanno diventando abbastanza bravi a muoversi nel nostro mondo senza alcun intervento da parte nostra. Ma nonostante queste nuove competenze, presentano ancora un grosso punto debole: i più talentuosi del gruppo possono ancora essere fermati sulle loro tracce da una semplice maniglia.
Il problema, afferma Matt Mason, un robotico della Carnegie Mellon University, è che per tutte le capacità esistenti dei robot di muoversi autonomamente nel mondo, non possono ancora interagire fisicamente con gli oggetti in modo significativo una volta arrivati lì.
“Cosa abbiamo imparato dalla robotica? La lezione numero uno è che la manipolazione è dura. Ciò è contrario alla nostra esperienza individuale, poiché quasi ogni essere umano è un abile manipolatore ”, scrive Mason in un recente articolo di revisione.
È un punto giusto. Noi umani manipoliamo il mondo che ci circonda senza pensare. Afferriamo, colpiamo, torciamo, tritiamo e produciamo oggetti quasi inconsciamente, grazie in parte alle nostre mani incredibilmente abili. Di conseguenza, abbiamo costruito i nostri mondi tenendo presenti quelle appendici. Tutti i telefoni cellulari, tastiere, radio e altri strumenti che abbiamo gestito per tutta la nostra vita sono stati progettati esplicitamente per adattarsi alle nostre dita e ai nostri palmi.
Non così per i robot esistenti. Al momento, uno dei disegni robotici più utilizzati a mano, chiamato "pinza", è più o meno identico a quelli immaginati in TV negli anni '60: un dispositivo fatto di due dita metalliche rigide che pizzicano oggetti tra loro.
In un ambiente controllato come una catena di montaggio, dispositivi come questi funzionano perfettamente. Se un robot sa che ogni volta che raggiunge una parte specifica, sarà nello stesso posto e orientamento, quindi afferrarlo è banale. "È chiaro che tipo di parte scenderà sul nastro trasportatore, il che rende il rilevamento e la percezione relativamente facili per un robot", osserva Jeannette Bohg, un robotista dell'Università di Stanford.
Il mondo reale, d'altra parte, è disordinato e pieno di incognite. Pensa solo alla tua cucina: potrebbero esserci pile di piatti che si asciugano vicino al lavandino, verdure morbide e fragili che rivestono il frigorifero e più utensili riposti in cassetti stretti. Dal punto di vista di un robot, dice Bohg, identificare e manipolare quella vasta gamma di oggetti sarebbe un caos assoluto.
“Questo è in un certo senso il Santo Graal, giusto? Molto spesso, vuoi manipolare una vasta gamma di oggetti che le persone comunemente manipolano e sono stati fatti manipolare dalle persone ”, afferma Matei Ciocarlie, ricercatore di robotica e ingegnere meccanico presso la Columbia University. “Possiamo costruire manipolatori per oggetti specifici in situazioni specifiche. Non è un problema. È la versatilità che è la difficoltà. ”
Per far fronte all'enorme numero di forme uniche e proprietà fisiche di quei materiali, siano essi solidi come un coltello o deformabili, come un pezzo di plastica, un'appendice robotica ideale sarebbe necessariamente qualcosa che ricorda ciò che sta alla fine di le nostre braccia. Anche con ossa rigide, le nostre mani si piegano e si flettono mentre afferriamo gli oggetti, quindi se la mano di un robot può fare lo stesso, potrebbe "ingabbiare" gli oggetti all'interno della sua presa e spostarli su una superficie rastrellandoli come fa un bambino i suoi giocattoli.
Progettare che la versatilità non è cosa da poco. Quando gli ingegneri di iRobot - la stessa azienda che ti ha portato l'aspirapolvere Roomba - hanno sviluppato una "mano" flessibile a tre dita diversi anni fa, è stata salutata come un'impresa importante. Oggi i robot continuano a voltare le spalle a una fedele replica della mano umana, guardando verso materiali morbidi e migliori strumenti computazionali come l'apprendimento automatico per controllarli.
La ricerca di "mani" morbide e flessibili
"Le pinze Humanlike tendono ad essere molto più delicate e molto più costose, perché hai molti più motori e sono imballati in un piccolo spazio", afferma Dmitry Berenson, che studia manipolazione robotica autonoma all'Università del Michigan. "Davvero, devi avere molta ingegneria per farlo funzionare e molta manutenzione, di solito." A causa di questi limiti, dice, le mani umane simili a quelle esistenti non sono ampiamente utilizzate dall'industria.
Perché una mano robotica sia pratica e si avvicini anche alle capacità di un essere umano, dovrebbe essere ferma ma flessibile; essere in grado di percepire freddo, caldo e tocco ad alta risoluzione; ed essere abbastanza gentile da raccogliere oggetti fragili ma abbastanza robusto da resistere a un pestaggio. Oh, e per di più, dovrebbe essere economico.
Per ovviare a questo problema, alcuni ricercatori stanno cercando di creare un mezzo felice. Stanno testando mani che imitano alcuni dei nostri tratti, ma sono molto più semplici da progettare e costruire. Ognuno usa "dita" in lattice morbido guidate da cavi tendinei che le tirano aperte e chiuse. Il vantaggio di questo tipo di design è la loro flessibilità letterale: quando incontrano un oggetto, possono schiacciarlo attorno, formare la sua forma complessa e raccoglierlo in modo ordinato.
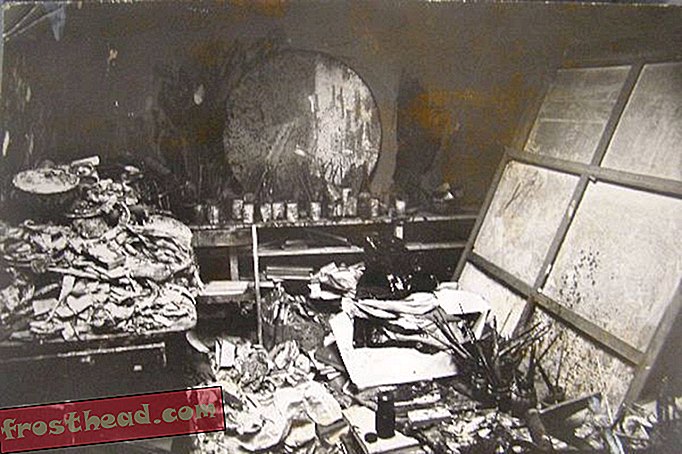
 Invece di mani che imitano da vicino le nostre, alcuni ricercatori stanno lavorando a quelle morbide e flessibili in silicone. In questa immagine, le dita cave di silicone si piegano mentre si riempiono d'aria, stringendole attorno a oggetti di forma insolita. (J. MORROW ET AL / CONFERENZA INTERNAZIONALE IEEE SU ROBOTICA E AUTOMAZIONE (ICRA) 2016)
Invece di mani che imitano da vicino le nostre, alcuni ricercatori stanno lavorando a quelle morbide e flessibili in silicone. In questa immagine, le dita cave di silicone si piegano mentre si riempiono d'aria, stringendole attorno a oggetti di forma insolita. (J. MORROW ET AL / CONFERENZA INTERNAZIONALE IEEE SU ROBOTICA E AUTOMAZIONE (ICRA) 2016) Tali "mani" squishy offrono un notevole miglioramento rispetto a una pinza in metallo duro. Ma iniziano solo a risolvere il problema. Sebbene un dito gommoso funzioni alla grande per raccogliere tutti i tipi di oggetti, farà fatica con le abilità motorie necessarie per compiti semplici come posizionare una moneta in una fessura - il che implica non solo tenere la moneta, ma anche sentire la fessura, evitando i suoi bordi e facendo scorrere la moneta all'interno. Per questo motivo, afferma Ciocarlie, la creazione di sensori che raccontano ai robot di più sugli oggetti che toccano è una parte altrettanto importante del puzzle.
Le nostre punte delle dita hanno migliaia di singoli recettori tattili incorporati nella pelle. "Non sappiamo davvero come costruire questo tipo di sensori e, anche se lo facessimo, faremmo fatica a collegarli e a recuperare quelle informazioni", afferma Ciocarlie.
Il solo numero di sensori richiesti solleverebbe un secondo, ancora più problematico problema: cosa fare di tutte queste informazioni una volta che le hai. Stanno iniziando a emergere metodi computazionali che consentono a un robot di utilizzare enormi quantità di dati sensoriali per pianificare la sua prossima mossa, afferma Berenson. Ma portare queste abilità fino al punto in cui devono essere può superare tutte le altre sfide che i ricercatori devono affrontare per ottenere una manipolazione autonoma. Costruire un robot in grado di usare le sue "mani" in modo rapido e senza soluzione di continuità - anche in situazioni completamente nuove - potrebbe non essere possibile a meno che gli ingegneri non possano dotarlo di una forma di intelligenza complessa.
Quella potenza del cervello è qualcosa che molti di noi umani danno per scontato. Per prendere una matita sulla nostra scrivania, semplicemente allungiamo la mano e la prendiamo. Quando ceniamo, usiamo pinze, forchette e bacchette per prendere il nostro cibo con grazia e precisione. Anche gli amputati che hanno perso gli arti superiori possono imparare a usare ganci protesici per compiti che richiedono abilità motorie.
“Possono allacciarsi le scarpe, possono fare un panino, possono vestirsi - tutto con il meccanismo più semplice. Quindi sappiamo che è possibile se si ha la giusta intelligenza dietro ”, afferma Berenson.
Insegnare alla macchina
Raggiungere quel livello di intelligenza in un robot può richiedere un salto negli attuali metodi che i ricercatori usano per controllarli, afferma Bohg. Fino a poco tempo fa, la maggior parte dei software di manipolazione comportava la costruzione di modelli matematici dettagliati di situazioni del mondo reale, lasciando quindi che il robot usasse quei modelli per pianificare il suo movimento. Un robot di recente costruzione incaricato di assemblare una sedia Ikea, ad esempio, utilizza un modello software in grado di riconoscere ogni singolo pezzo, capire come si adatta con i suoi vicini e confrontarlo con l'aspetto del prodotto finale. Può terminare il lavoro di assemblaggio in circa 20 minuti. Chiedigli di assemblare un prodotto Ikea diverso, però, e sarà completamente sfumato.
Gli umani sviluppano abilità in modo molto diverso. Invece di avere una profonda conoscenza di un singolo argomento ristretto, assorbiamo la conoscenza al volo dall'esempio e dalla pratica, rafforzando i tentativi che funzionano e respingendo quelli che non lo fanno. Ripensa alla prima volta che hai imparato a tagliare una cipolla: una volta che hai capito come tenere il coltello e affettare alcune volte, probabilmente non hai dovuto ricominciare da capo quando hai incontrato una patata. Quindi come si fa a fare in modo che un robot lo faccia?
Bohg pensa che la risposta potrebbe risiedere nel "machine learning", una sorta di processo iterativo che consente a un robot di capire quali tentativi di manipolazione hanno successo e quali no - e gli consente di utilizzare tali informazioni per manovrare in situazioni che non si sono mai incontrate.
"Prima che l'apprendimento automatico entrasse nel campo della robotica, si trattava di modellare la fisica della manipolazione, inventando descrizioni matematiche di un oggetto e del suo ambiente", afferma. "L'apprendimento automatico ci consente di dare a un robot un mucchio di esempi di oggetti che qualcuno ha annotato, mostrandoli, 'Qui è un buon posto per afferrare.'" Un robot potrebbe usare questi dati passati per guardare un oggetto completamente nuovo e capire come afferralo.
Questo metodo rappresenta un grande cambiamento rispetto alle precedenti tecniche di modellazione, ma potrebbe volerci un po 'prima che sia abbastanza sofisticato da consentire ai robot di apprendere interamente da soli, afferma Berenson. Molti algoritmi di apprendimento automatico esistenti devono ricevere grandi quantità di dati sui possibili risultati - come tutte le mosse potenziali in una partita a scacchi - prima che possano iniziare a elaborare il miglior piano di attacco possibile. In altri casi, potrebbero aver bisogno di centinaia, se non di migliaia, di tentativi di manipolazione di un determinato oggetto prima di imbattersi in una strategia che funziona.
Ciò dovrà cambiare se un robot deve muoversi e interagire con il mondo il più rapidamente possibile. Invece, afferma Berenson, un robot ideale dovrebbe essere in grado di sviluppare nuove abilità in pochi passaggi usando tentativi ed errori, o essere in grado di estrapolare nuove azioni da un singolo esempio.
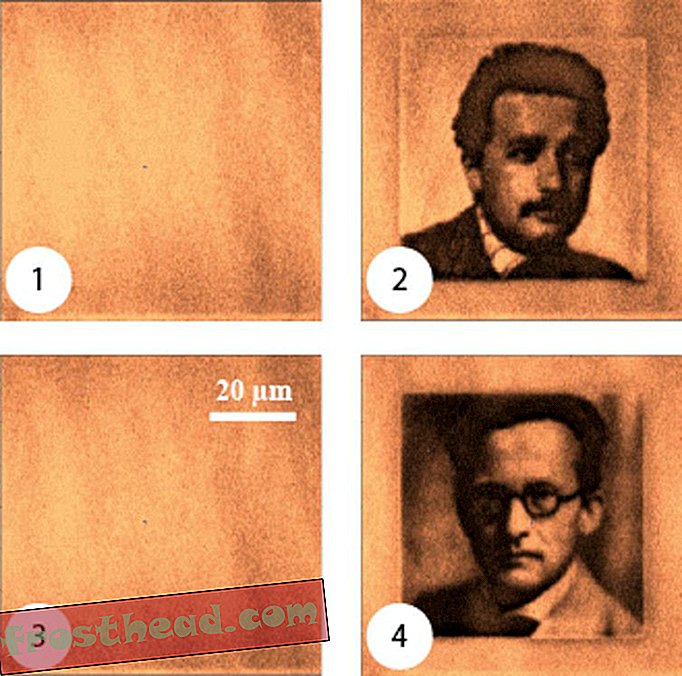
 Apollo, un robot costruito dall'ingegnere Jeannette Bohg, cerca di spostare un cilindro su un tavolo mentre una scatola di cartone si blocca. In questo esperimento, un ricercatore ha spostato la scatola in nuove posizioni sul tavolo mentre il braccio si muoveva, costringendo Apollo a ricalcolare al volo la sua traiettoria. L'immagine confusa nell'angolo in basso a destra mostra una vista dalla prospettiva di Apollo, sottolineando quanto sia difficile per un robot riconoscere e interagire con gli oggetti circostanti. (COURTESY JEANNETTE BOHG)
Apollo, un robot costruito dall'ingegnere Jeannette Bohg, cerca di spostare un cilindro su un tavolo mentre una scatola di cartone si blocca. In questo esperimento, un ricercatore ha spostato la scatola in nuove posizioni sul tavolo mentre il braccio si muoveva, costringendo Apollo a ricalcolare al volo la sua traiettoria. L'immagine confusa nell'angolo in basso a destra mostra una vista dalla prospettiva di Apollo, sottolineando quanto sia difficile per un robot riconoscere e interagire con gli oggetti circostanti. (COURTESY JEANNETTE BOHG) "La grande domanda da superare è: come possiamo aggiornare i modelli di un robot non con 10 milioni di esempi, ma uno ?", Afferma. "Per arrivare a un punto in cui si dice:" OK, questo non ha funzionato, quindi cosa devo fare dopo? " Questa è la vera domanda di apprendimento che vedo. ”
Mason, il robotico di Carnegie Mellon, è d'accordo. La sfida dei robot di programmazione di fare ciò che facciamo senza pensarci, dice, è riassunta da qualcosa chiamato paradosso di Moravec (dal nome del pioniere della robotica Hans Moravec, che insegna anche a Carnegie Mellon). In breve, afferma che ciò che è difficile da fare per gli umani è spesso gestito con facilità dai robot, ma ciò che per noi è una seconda natura è incredibilmente difficile da programmare. Un computer può giocare a scacchi meglio di qualsiasi altra persona, per esempio - ma riuscire a riconoscerlo e raccogliere un pezzo degli scacchi da solo si è rivelato incredibilmente difficile.
Per Mason, questo suona ancora vero. Nonostante i graduali progressi che i ricercatori stanno compiendo sui sistemi di controllo robotici, afferma, il concetto di base di manipolazione autonoma potrebbe essere uno dei dadi più difficili che il campo deve ancora rompere.
"Il pensiero razionale e consapevole è uno sviluppo relativamente recente nell'evoluzione", afferma. “Abbiamo tutte queste altre macchine mentali che nel corso di centinaia di milioni di anni hanno sviluppato la capacità di fare cose straordinarie, come locomozione, manipolazione, percezione. Eppure tutte queste cose stanno accadendo al di sotto del livello cosciente.
"Forse le cose che consideriamo come funzioni cognitive più elevate, come essere in grado di giocare a scacchi o fare algebra - forse quelle cose sono banali rispetto alla meccanica della manipolazione."
 Knowable Magazine è uno sforzo giornalistico indipendente dalle revisioni annuali.
Knowable Magazine è uno sforzo giornalistico indipendente dalle revisioni annuali.